
Маленькие роботы, которые способны пролезть даже внутрь живых организмов, уже перестали быть фантастикой. В октябре 2018 года ученые из Эксетерского университета создали механизм, который перемещается в жидкостях при помощи чувствительных к магнетизму жгутиков. Крохотные роботы нужны и для ремонта реактивных двигателей и других составных частей разнообразной техники. В этом случае жгутиками не обойтись, поэтому исследователи из Гарвардского университета придумали крохотных роботов с магнитными ножками.
Они напоминают насекомых и основаны на созданных ранее амбулаторных микро-роботах HAMR. Предыдущие версии механизмов умели ходить даже по воде, но текущая модификация HAMR-E способна на большее — взбираться на вертикальные поверхности. Примечательно, что буква E в названии обозначает электроадгезию — способность робота удерживать предметы за счет электростатического притяжения.
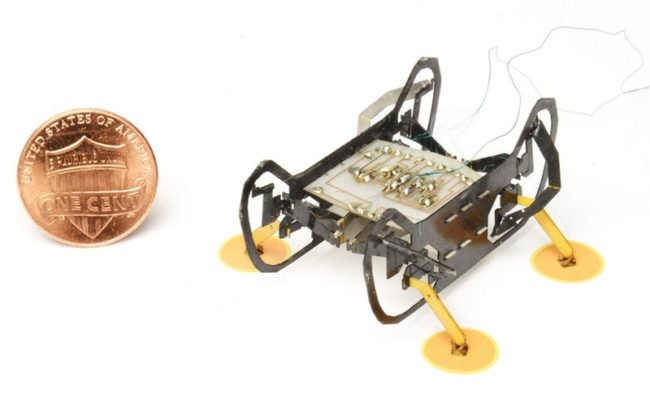
Статическое электричество образуется в ножках, сделанных из медного электрода с полиимидной изоляцией. Перед тем как поднять ногу, робот отключает питание соответствующей конечности, а чтобы опустить — включает его. Окончания ножек сделаны гибкими, чтобы робот легче взбирался по изогнутым поверхностям.
Также разработчики модифицировали голеностопные суставы — они вращаются в трех измерениях и позволяют роботам изворачиваться в зависимости от местности. Также была разработана новая походка, чтобы при поднятии одной ноги, тройка остальных оставалась приклеенной к поверхности.
Испытательный робот успешно прошел тестирование и сделал более 100 шагов по горизонтальной и вертикальной поверхности и ни разу не упал. В будущем разработчики намерены улучшить липкость ножек на более широком спектре поверхностей. Также им необходимо поработать над грузоподъемностью — для полноценной работы важно оснастить их датчиками и камерой.
По словам одного из создателей HAMR-E Себастьяна де Риваза, благодаря перемещению по горизонтальным и вертикальным поверхностям роботы способны диагностировать поломки любых механизмов. С их помощью можно обнаружить поломку не вскрывая корпуса устройств.





